Improves computed solution to a system of inear equations. More...
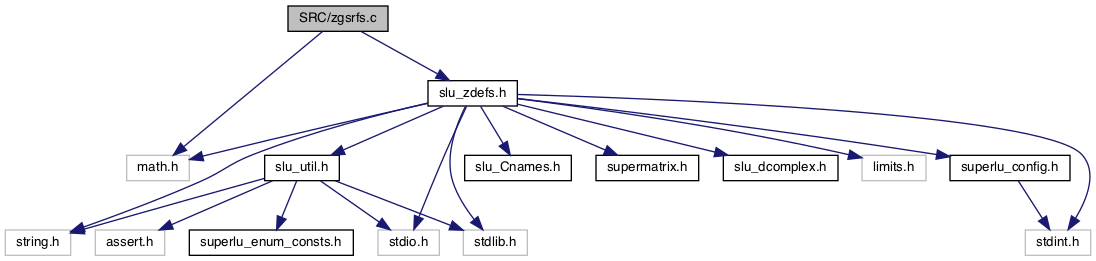
Include dependency graph for zgsrfs.c:
Macros | |
| #define | ITMAX 5 |
Functions | |
| void | zgsrfs (trans_t trans, SuperMatrix *A, SuperMatrix *L, SuperMatrix *U, int *perm_c, int *perm_r, char *equed, double *R, double *C, SuperMatrix *B, SuperMatrix *X, double *ferr, double *berr, SuperLUStat_t *stat, int *info) |
Detailed Description
Copyright (c) 2003, The Regents of the University of California, through Lawrence Berkeley National Laboratory (subject to receipt of any required approvals from U.S. Dept. of Energy)
All rights reserved.
The source code is distributed under BSD license, see the file License.txt at the top-level directory.
-- SuperLU routine (version 5.1) -- Univ. of California Berkeley, Xerox Palo Alto Research Center, and Lawrence Berkeley National Lab. October 15, 2003 Modified from lapack routine ZGERFS Last modified: December 3, 2015
Macro Definition Documentation
◆ ITMAX
| #define ITMAX 5 |
Function Documentation
◆ zgsrfs()
| void zgsrfs | ( | trans_t | trans, |
| SuperMatrix * | A, | ||
| SuperMatrix * | L, | ||
| SuperMatrix * | U, | ||
| int * | perm_c, | ||
| int * | perm_r, | ||
| char * | equed, | ||
| double * | R, | ||
| double * | C, | ||
| SuperMatrix * | B, | ||
| SuperMatrix * | X, | ||
| double * | ferr, | ||
| double * | berr, | ||
| SuperLUStat_t * | stat, | ||
| int * | info | ||
| ) |
Purpose
=======
ZGSRFS improves the computed solution to a system of linear
equations and provides error bounds and backward error estimates for
the solution.
If equilibration was performed, the system becomes:
(diag(R)*A_original*diag(C)) * X = diag(R)*B_original.
See supermatrix.h for the definition of 'SuperMatrix' structure.
Arguments
=========
trans (input) trans_t
Specifies the form of the system of equations:
= NOTRANS: A * X = B (No transpose)
= TRANS: A'* X = B (Transpose)
= CONJ: A**H * X = B (Conjugate transpose)
A (input) SuperMatrix*
The original matrix A in the system, or the scaled A if
equilibration was done. The type of A can be:
Stype = SLU_NC, Dtype = SLU_Z, Mtype = SLU_GE.
L (input) SuperMatrix*
The factor L from the factorization Pr*A*Pc=L*U. Use
compressed row subscripts storage for supernodes,
i.e., L has types: Stype = SLU_SC, Dtype = SLU_Z, Mtype = SLU_TRLU.
U (input) SuperMatrix*
The factor U from the factorization Pr*A*Pc=L*U as computed by
zgstrf(). Use column-wise storage scheme,
i.e., U has types: Stype = SLU_NC, Dtype = SLU_Z, Mtype = SLU_TRU.
perm_c (input) int*, dimension (A->ncol)
Column permutation vector, which defines the
permutation matrix Pc; perm_c[i] = j means column i of A is
in position j in A*Pc.
perm_r (input) int*, dimension (A->nrow)
Row permutation vector, which defines the permutation matrix Pr;
perm_r[i] = j means row i of A is in position j in Pr*A.
equed (input) Specifies the form of equilibration that was done.
= 'N': No equilibration.
= 'R': Row equilibration, i.e., A was premultiplied by diag(R).
= 'C': Column equilibration, i.e., A was postmultiplied by
diag(C).
= 'B': Both row and column equilibration, i.e., A was replaced
by diag(R)*A*diag(C).
R (input) double*, dimension (A->nrow)
The row scale factors for A.
If equed = 'R' or 'B', A is premultiplied by diag(R).
If equed = 'N' or 'C', R is not accessed.
C (input) double*, dimension (A->ncol)
The column scale factors for A.
If equed = 'C' or 'B', A is postmultiplied by diag(C).
If equed = 'N' or 'R', C is not accessed.
B (input) SuperMatrix*
B has types: Stype = SLU_DN, Dtype = SLU_Z, Mtype = SLU_GE.
The right hand side matrix B.
if equed = 'R' or 'B', B is premultiplied by diag(R).
X (input/output) SuperMatrix*
X has types: Stype = SLU_DN, Dtype = SLU_Z, Mtype = SLU_GE.
On entry, the solution matrix X, as computed by zgstrs().
On exit, the improved solution matrix X.
if *equed = 'C' or 'B', X should be premultiplied by diag(C)
in order to obtain the solution to the original system.
FERR (output) double*, dimension (B->ncol)
The estimated forward error bound for each solution vector
X(j) (the j-th column of the solution matrix X).
If XTRUE is the true solution corresponding to X(j), FERR(j)
is an estimated upper bound for the magnitude of the largest
element in (X(j) - XTRUE) divided by the magnitude of the
largest element in X(j). The estimate is as reliable as
the estimate for RCOND, and is almost always a slight
overestimate of the true error.
BERR (output) double*, dimension (B->ncol)
The componentwise relative backward error of each solution
vector X(j) (i.e., the smallest relative change in
any element of A or B that makes X(j) an exact solution).
stat (output) SuperLUStat_t*
Record the statistics on runtime and floating-point operation count.
See util.h for the definition of 'SuperLUStat_t'.
info (output) int*
= 0: successful exit
< 0: if INFO = -i, the i-th argument had an illegal value
Internal Parameters
===================
ITMAX is the maximum number of steps of iterative refinement.
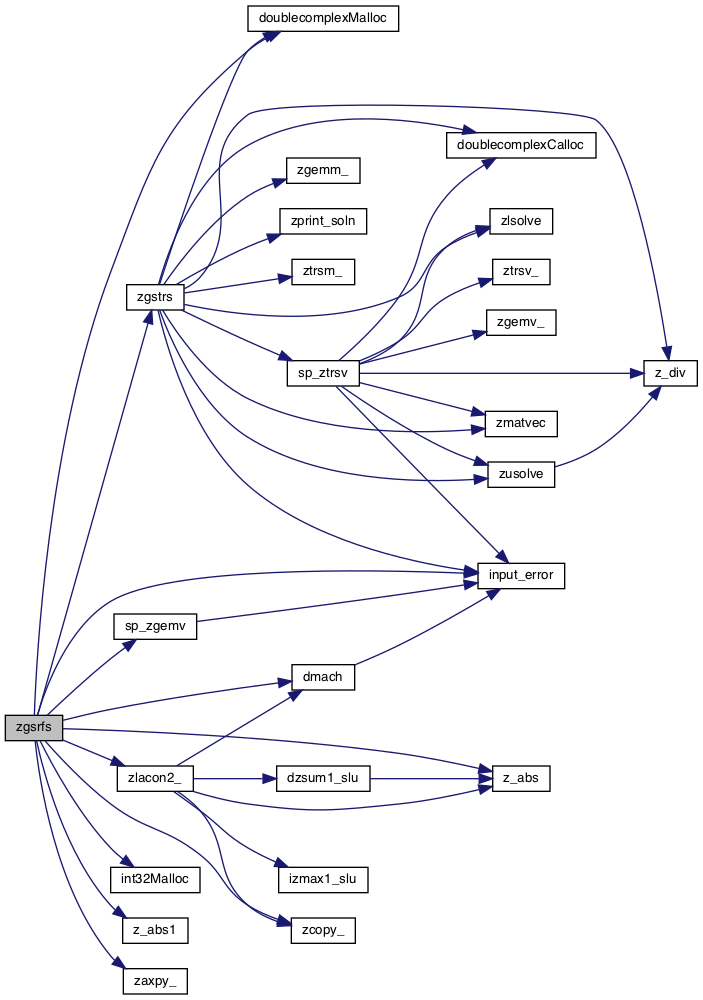
Here is the call graph for this function: